This week we focused on transferring some of our ideas on paper into a working prototype.
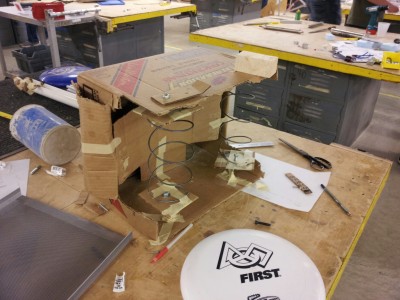
Below is our part of our concept to pick up the Frisbees laying around. It works very similar to a snack vending machine, in that the coil can move the item, in this case up to the shooter. This was the first attempt at an apparatus to pick Frisbees up. This rough version showed us that this design is feasible but needs refinement and to work it into our final design.
Our Shooter team plans to use a wheel on the side of chamber that the Frisbee will pass through, the wheel will shoot out the Frisbee. The profile is to be relatively small, because for our climber idea to work, we have to stay under 30″.

We made a working prototype of our chassis today, which will let us begin to work out final dimensions.


Our Programmers successfully got one of our older robots to move around, and that code should be transferable to our newest robot.
Below are two of our climbing concepts, one using a skid, the other a robotic pneumatic arm.
By the way, check out our new youtube channel, B’EAST Robotics here.